Эти устройства сегодня особенно востребованы в народном хозяйстве.
Промышленный робот, мало похожий на свой прообраз в книге К. Чапека
«Восстание роботов», - отнюдь не питает революционные идеи. Наоборот, он
добросовестно выполняет, причем с большой точностью, как основные процессы производства (сборку, сварку, окраску), так и вспомогательные (загрузку-выгрузку, фиксацию изделия при изготовлении, перемещение).
Кстати вот самая выгодная аренда манипулятора в Подольске по доступным ценам от проекта flurstroy.ru.
Применение таких «умных» машин способствует эффективному решению трех важнейших проблем производства:
- повышения производительности труда;
- улучшения условий труда людей;
- оптимизации использования человеческих ресурсов.
Промышленные роботы - детище крупного производства
Роботы на производстве массово распространились в конце XX века в связи со значительным ростом промышленного производства.
Крупные серии продукции обусловили потребность в интенсивности и
качестве такой работы, выполнение которой превышает объективные
человеческие возможности. Вместо того, чтобы задействовать многие тысячи
квалифицированных рабочих, на современных технологичных заводах
функционируют многочисленные высокоэффективные автоматические линии,
работающие в режиме прерывного либо непрерывного циклов.
Лидерами
в развитии подобных технологий, декларирующих широкое применение
промышленных роботов, выступают Япония, США, Германия, Швеция и
Швейцария. На две большие группы подразделяются изготовляемые в
вышеперечисленных странах современные промышленные роботы. Виды их
определяются принадлежностью к двум принципиально разным способам
управления:
- автоматические манипуляторы;
- устройства, дистанционно управляемые человеком.
Для чего их используют?
О
потребности в их создании начали говорить еще в начале XX века. Однако
на то время еще не существовало элементной базы для осуществления
задуманного. Сегодня, следуя велению времени, роботы-машины используются
в большинстве наиболее технологичных производств.
К
сожалению, переоснащение такими «умными» машинами целых отраслей
промышленности затруднено дефицитом инвестиций. Хотя плюсы от их
использования явно превышают первоначальные денежные затраты, ведь они
позволяют говорить не только и не столько об автоматизации, сколько о
глубоких изменениях в сфере производства и труда.
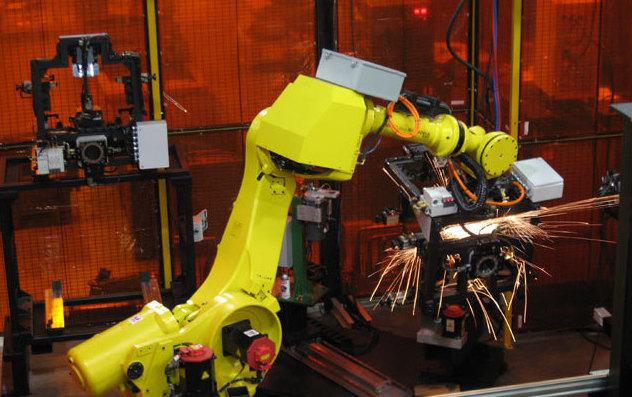
Применение
промышленных роботов позволило эффективнее выполнять непосильные
человеку по трудоемкости и точности работы: загрузку/разгрузку, укладку,
сортировку, ориентацию деталей; перемещение заготовок от одного робота к
другому, а готовых изделий - на склад; точечную сварку и сварку швов;
сборку механических и электронных деталей; прокладывание кабеля;
разрезание заготовок по сложному контуру.
Манипулятор как составляющая промышленного робота
 Функционально
состоит такая «умная» машина из перепрограммируемой САУ (системы
автоматического управления) и рабочего тела (системы передвижения и
механического манипулятора). Если САУ обычно достаточно компактна,
визуально скрыта и не бросается сразу в глаза, то рабочее тело обладает
настолько характерным видом, что промышленного робота часто называют
следующим образом: «робот-манипулятор».
Функционально
состоит такая «умная» машина из перепрограммируемой САУ (системы
автоматического управления) и рабочего тела (системы передвижения и
механического манипулятора). Если САУ обычно достаточно компактна,
визуально скрыта и не бросается сразу в глаза, то рабочее тело обладает
настолько характерным видом, что промышленного робота часто называют
следующим образом: «робот-манипулятор».
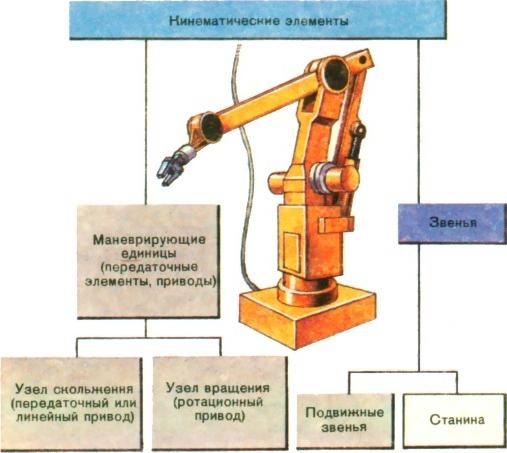
По
определению, манипулятором называют устройство, осуществляющее
перемещение в пространстве рабочих поверхностей и предметов труда. Эти
приборы состоят из звеньев двух видов. Первые обеспечивают движение
поступательного характера. Вторые - угловые перемещения. Такие
стандартные звенья для своего движения используют либо пневматический,
либо гидравлический (более мощный) привод.
Манипулятор, созданный
по аналогии с человеческой рукой, для работы с деталями оснащен
технологичным захватным устройством. В различных устройствах подобного
типа непосредственно захват чаще всего осуществляли механические пальцы.
При работе с плоскими поверхностями предметы захватывались с помощью
механических присосок.
Если же манипулятор должен был работать
одновременно со многими однотипными заготовками, то захват осуществлялся
благодаря специальной обширной конструкции.
Вместо захватного
устройства манипулятор часто оснащают мобильным сварочным оборудованием,
особым технологичным пульверизатором или же просто отверткой.
Как робот перемещается
Автоматы-роботы
обычно приспосабливают к двум видам перемещения в пространстве (хотя
часть из них можно назвать стационарными). Это зависит от условий
конкретного производства. Если необходимо обеспечить движение по гладкой
поверхности, то его реализуют с помощью направленного монорельса. Если
требуется работать на разных уровнях, используют «шагающие» системы с
пневматическими присосками. Движущийся робот прекрасно ориентируется как
в пространственных, так и в угловых координатах. Современные устройства
позиционирования подобных устройств унифицированы, они состоят из
технологических блоков и позволяют обеспечить высокоточное перемещение
обрабатываемых деталей весом от 250 до 4000 кг.
Конструкция
Использование
рассматриваемых автоматизированных машин именно на многопрофильных
производствах обусловило некую унификацию их основных составляющих
блоков. Современные промышленные роботы-манипуляторы имеют в своей
конструкции:
- станину,
используемую для крепления деталезахватывающего устройства (грейфера), -
своеобразную «руку», собственно и выполняющую обработку;
- грейфер с направляющей (последняя определяет положение «руки» в пространстве);
- устройства
обеспечения, приводящие, преобразовывающие и передающие энергию в виде
вращающего момента на оси (благодаря им промышленный робот получает
потенциал движения);
- систему контроля и управления выполнения
возложенных на него программ; приема новых программ; анализа поступающих
от датчиков информации, и, соответственно, передачи ее на
обеспечивающие устройства;
- систему позиционирования рабочей части, измерения позиций и перемещений по осям манипуляции.
Заря создания индустриальных роботов

Вернемся
в недалекое прошлое и вспомним, как начиналась история создания
промышленных машин-автоматов. Первые роботы появились в США в 1962 г., и
произведены они были компаниями «Юнимейшн Инкорпорэйтед» и «Версатран».
Хотя, если быть точными, то раньше все-таки выпустили промышленного
робота «Юнимейт», созданного американским инженером Д. Деволом,
запатентовавшим собственную САУ, программируемую с помощью перфокарт.
Это был очевидный технический прорыв: «умные» машины запоминали
координаты точек своего маршрута и выполняли работу согласно программе.
Первый
промышленный робот «Юнимейт» был оснащен двухпальцевым устройством для
захвата на пневмоприводе и «рукой» на гидроприводе с пятью степенями
свободы. Его характеристики позволяли перемещать 12-килограммовую деталь
с точностью до 1,25 мм.
Другой робот-манипулятор «Версатран»,
созданный одноименной компанией, загружал и разгружал 1200 кирпичей в
час в печь для обжига. Он успешно заменял труд людей во вредной для их
здоровья среде с высокой температурой. Идея его создания оказалась
весьма удачной, а конструкция - настолько надежной, что отдельные машины
этой марки продолжают работать и в наше время. И это несмотря на то,
что их ресурс превысил сотни тысяч часов.
Отметим, что устройство
промышленных роботов первого поколения в стоимостном выражении
предполагало 75% механики и 25% электроники. Переналадка таких приборов
требовала времени и обуславливала простои оборудования. Для
перепрофилирования их с целью выполнения новой работы производилась
замена программы управления.
Второе поколение машин-роботов
Вскоре
выяснилось: несмотря на все плюсы, машины первого поколения оказались
несовершенными… Второе поколение предполагало более тонкое управление
промышленными роботами - адаптивное. Самые первые устройства требовали
упорядочения среды, в которой они работали. Последнее обстоятельство
часто обозначало высокие дополнительные расходы. Это становилось
критичным для развития массового производства.
Новый этап
прогресса характеризовался разработкой множества датчиков. С их помощью
робот получил качество, названное «очувствлением». Он стал получать
информацию о внешней среде и, сообразуясь с ней, выбирать оптимальный
вариант действий. Например, обрел навыки, позволяющие взять деталь и
обойти с ней препятствие. Происходит такое действие благодаря
микропроцессорной обработке полученной информации, которой далее,
введенной в переменные управляющих программ, реально руководствуются
роботы.
Виды основных производственных операций (сварка, покраска,
сборка, различного рода механическая обработка) также подлежат
адаптации. То есть при выполнении каждой из них инициируется
многовариантность для улучшения качества любого вида вышеперечисленных
работ.
Управление промышленными манипуляторами в основном
осуществляется программно. Аппаратным обеспечением управляющей функции
служат промышленные мини-компьютеры PC/104 или MicroPC. Заметим, что
адаптивное управление основано на многовариантном программном
обеспечении. Причем решение о выборе типа работы программы принимается
роботом на основании информации о среде, описанной детекторами.
Характерной
чертой функционирования робота второго поколения является
предварительное наличие установленных режимов работы, каждый из которых
активируется при определенных показателях, полученных из внешней среды.
Третье поколение роботов

Автоматы-роботы
третьего поколения способны самостоятельно генерировать программу своих
действий в зависимости от поставленной задачи и обстоятельств внешней
среды. У них нет «шпаргалок», т. е. расписанных технологичных действий
при определенных вариантах внешней среды. Они обладают умением
самостоятельно оптимально выстраивать алгоритм своей работы, а также
оперативно реализовывать его практически. Стоимость электроники такого
промышленного робота в десятки раз выше его механической части.
Новейший
робот, осуществляя захват детали благодаря сенсорам, «знает», насколько
удачно он это сделал. Кроме того, регулируется сама сила захвата
(обратная связь по усилию) в зависимости от хрупкости материала детали.
Возможно, именно поэтому устройство промышленных роботов нового
поколения называют интеллектуальным.
Как вы понимаете, «мозгом»
такого прибора является система его управления. Наиболее перспективным
является регулирование, осуществляемое согласно методам искусственного
интеллекта.
Интеллект этим машинам задают пакеты прикладных программ,
программируемые логические контроллеры, инструменты моделирования. На
производстве промышленные роботы объединяются в сеть, обеспечивая
должный уровень взаимодействия системы «человек - машина». Также
разработаны инструменты прогнозирования функционирования таких приборов в
будущем благодаря реализованному программному моделированию, что
позволяет выбирать оптимальные варианты действия и конфигурации
подключения в сеть.
Ведущие мировые компании, производящие роботов
Сегодня
применение промышленных роботов обеспечивается ведущими компаниями,
среди которых японские (Fanuc, Kawasaki, Motoman, OTC Daihen,
Panasonic), американские (KC Robots, Triton Manufacturing, Kaman
Corporation), немецкая (Kuka).
Чем известны в мире эти фирмы? В
активе Fanuc - наиболее быстрый на сегодняшний день дельта-робот M-1iA
(такие машины используются обычно при упаковке), самый сильный из
роботов-серийников - M-2000iA, признанные во всем мире роботы-сварщики
ArcMate.
Не менее востребованы промышленные роботы на
производстве, выпущенные компанией Kuka. Эти машины с немецкой точностью
осуществляют обработку, сварку, сборку, упаковку, паллетизацию,
погрузку.
Также внушителен модельный ряд японско-американской
компании Motoman (Yaskawa), работающей на американский рынок: 175
моделей промышленных роботов, а также более 40 интегрированных решений.
Промышленные роботы, на производстве используемые в США, в большинстве
своем изготовлены именно этой ведущей в своей отрасли компанией.
Большинство
других представленных нами фирм занимают свою нишу путем изготовления
более узкого ассортимента специализированных приборов. Например, Daihen и
Panasonic выпускают сварочных роботов.
Способы организации автоматизированного производства
 Если
говорить об организации автоматизированного производства, то вначале
был реализован жесткий линейный принцип. Однако он при достаточно
высокой скорости производственного цикла имеет существенный недостаток -
простои из-за сбоев. В качестве альтернативы была изобретена роторная
технология. При такой организации производства по кругу движется и
обрабатываемая деталь, и сама автоматизированная линия (роботы). Машины в
таком случае могут дублировать функции, и сбои при этом практически
исключены. Однако в этом случае теряется скорость. Идеальный вариант
организации процесса - гибрид двух вышеупомянутых. Называется он
роторно-конвейерным.
Если
говорить об организации автоматизированного производства, то вначале
был реализован жесткий линейный принцип. Однако он при достаточно
высокой скорости производственного цикла имеет существенный недостаток -
простои из-за сбоев. В качестве альтернативы была изобретена роторная
технология. При такой организации производства по кругу движется и
обрабатываемая деталь, и сама автоматизированная линия (роботы). Машины в
таком случае могут дублировать функции, и сбои при этом практически
исключены. Однако в этом случае теряется скорость. Идеальный вариант
организации процесса - гибрид двух вышеупомянутых. Называется он
роторно-конвейерным.
Промышленный робот как элемент гибкого автоматического производства
Современные
«умные» устройства быстро перенастраиваются, высокопродуктивно и
самостоятельно выполняют работы с помощью своей оснастки, обрабатывая
материалы и заготовки. В зависимости от специфики использования они
могут функционировать как в рамках одной программы, так и варьируя свою
работу, т. е. выбирая из фиксированного количества предоставленных
программ нужную.
Промышленный робот является составляющим
элементом гибкого автоматизированного производства (общепринятое
сокращение - ГАП). В последнее также входят:
- система, осуществляющая автоматизированное проектирование;
- комплекс автоматизированного управления технологическим оснащением производства;
- промышленные роботы-манипуляторы;
- автоматически работающий производственный транспорт;
- устройства, осуществляющие загрузку/выгрузку и размещение;
- системы контроля над производственными технологическими процессами;
- автоматическое управление производством.
Подробнее о практике применения роботов

Настоящими
промышленными приложениями являются современные роботы. Виды их
различны, и они обеспечивают высокую производительность стратегически
важных сфер промышленности. В частности, во многом экономика современной
Германии обязана своим растущим потенциалом их применению. В каких
отраслях трудятся эти «железные работники»? В металлообработке они
функционируют практически во всех процессах: литье, сварке, ковке,
обеспечивая высочайший уровень качества работы.
Литье как отрасль с
экстремальными условиями для человеческого труда (имеются в виду
высокие температуры и загрязнение) в значительной мере роботизировано.
Машины от Kuka монтируют даже в литейных цехах.
Пищевая
промышленность также получила от Kuka оборудование для производственных
целей. «Пищевые роботы» (фото представлены в статье) в большинстве своем
замещают людей на участках с особыми условиями. Распространены на
производствах машины, обеспечивающие в нагревающихся помещениях
микроклимат с температурой, не превышающей 30 градусов по Цельсию.
Роботы из нержавеющей стали виртуозно обрабатывают мясо, участвуют в
производстве молочных продуктов, а также, конечно, укладывают и
упаковывают продукты оптимальным образом.
Трудно переоценить вклад
таких приборов в автомобилестроительную промышленность. По признанию
специалистов, самыми мощными и производительными машинами на сегодняшний
день являются именно «куковские» роботы. Фото таких устройств,
осуществляющих весь спектр автосборочных операций, впечатляют. При этом
действительно пора говорить об автоматизированном производстве.
Обработку
пластмасс, выпуск пластика, изготовление сложнейших по форме деталей из
разнообразных материалов обеспечивают роботы на производстве в
действительно вредной для здоровья человека загрязненной среде.
Еще
одной важнейшей сферой применения «куковских» агрегатов является
деревообработка. Причем описываемые устройства обеспечивают как
выполнение индивидуальных заказов, так и налаживание крупного серийного
производства на всех стадиях - от первичной обработки и распиловки до
фрезеровки, сверления, шлифовки.
Цены
В настоящее время на
рынке России и стран СНГ востребованы произведенные компаниями Kuka и
Fanuc роботы. Цены их колеблются в пределах от 25 000 до 800 000 руб.
Такая внушительная разбежка объясняется существованием различных
моделей: стандартных малой грузоподъемности (5-15 кг), специальных
(решающих особенные задачи), специализированных (работающих в
нестандартной окружающей среде), большой грузоподъемности (до 4000 т).
Выводы
Следует
признать, что потенциал использования промышленных роботов все еще не
задействуется в полной мере. При этом стараниями специалистов
современные технологии позволяют реализовывать все более смелые идеи.
Потребности
в увеличении производительности мирового хозяйства и максимизация доли
интеллектуального человеческого труда служат мощными стимулами развития
все новых и новых типов и модификаций промышленных роботов.
Вас заинтересует
В РФ разрабатывают роботов для борьбы с авианосцами
Робот-страж Samsung SGR-A1 встанет на дежурство в корейской демилитаризованной зоне
Каре Халворсен представил нового робота MorpHex MKII
Бросить робота, чтобы выжить
Воин в кармане: Робот-связист























